해외 온라인 매체 더버지가 미국 MIT 연구팀의 로봇 움직임 학습용 머신러닝 개발 소식을 보도했다.
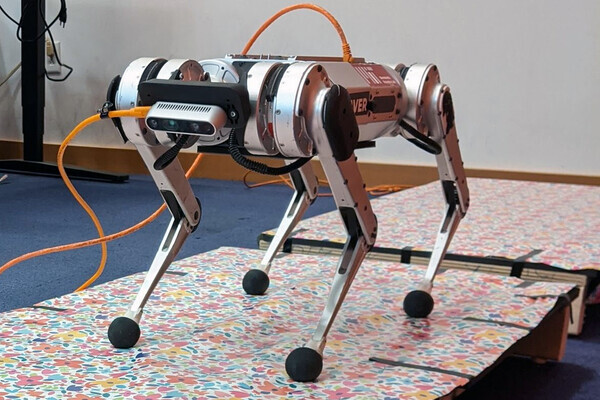
MIT 연구팀은 인공지능(AI)을 활용해 사족보행 로봇 ‘미니 치타(Mini Cheetah)가 걷는 방법과 달리는 방법을 학습하는 능력을 갖추도록 했다.
연구팀은 미니치타에 머신러닝 기법 중 한 가지인 강화학습을 활용했다. 강화학습을 적용한 채로 로봇이 학습 내용을 활용하는 과정에 따라 적절한 보상을 하면서 처음부터 걷고 뛰는 방법을 익히도록 한다. 다소 오랜 시간이 걸릴 수 있지만, 시간이 지나면서 가상 환경을 경험하면서 높은 적응 능력을 갖추도록 지원할 수 있었다.
미니치타는 강화학습 덕분에 3.9m/s의 속도로 이동할 수 있다.
또, 돌이 가득한 바닥 표면과 시멘트 바닥 등 이동하는 공간의 바닥 표면 조건이 달라져도 걷거나 이동할 수 있는 능력을 갖추었다. 그러나 이동 중 바닥 표면이 갑자기 달라질 때, 움직임이 다소 어색한 모습을 보인다.
미니치타 연구 논문 공동 저자인 가브리엘 마고리스(Gabriel Margolis)는 미니치타에 적용된 강화학습 기법이 걷는 속도 이외에 다른 요소에는 최적화되지 않았기 때문이라고 설명했다.
강화학습 모델은 유동적인 형태의 이동을 개발하도록 지시할 수 있다. 그러나 연구팀은 속도 향상 능력 학습을 최적화하고자 했다.
이에, 마고리스는 더버지와의 인터뷰에서 “강화학습 기법은 빠르게 움직이는 방법을 찾는다. 그러나 보상 방법이 정해지지 않은 사실을 고려하면, 인간이 바람직하게 생각하거나 자연스러운 모습으로 걷는 것에는 초점을 둘 이유가 없다”라고 말했다.
[ⓒ CWN(CHANGE WITH NEWS). 무단전재-재배포 금지]

![[신명호 칼럼] 과학의 속성, 과학적 실천과 과학 공동체](https://cwn.kr/news/data/2026/04/20/p1065599396560987_185_h.png)

![넷앤드, 파트너십으로 한국 보안 우수성 알릴 것 [다국어]](https://cwn.kr/news/data/2026/03/13/p1065581137999459_473_h.jpg)
![박찬대 의원, ‘ABC+E’로 인천 G3 코리아 비전…인천시장 출사표 [현장 르포]](https://cwn.kr/news/data/2026/03/03/p1065586364897699_463_h.jpg)
